# 环境光渲染(二)
# 3. 高光部分
# 3.1 原理
光照方程中的高光部分
同样使用蒙特卡洛进行近似积分
EPIC在此基础上提出了一种近似计算方法 (opens new window)
这种方法的好处是可以通过分开预计算,尽量减少实际渲染时的计算量,这个公式可以理解为“Env. lighting x BRDF”,左边的第一部分是小平面受到的所有环境光的采样值,第二部分只跟材质的BRDF属性相关。

# 3.2 预渲染环境光贴图(pre-filtered environment map)
第一个拆分项只和环境光照以及采样点有关,首先采样点集中在

实际应用中,这个拆分项是通过把环境光贴图预先渲染到一个环境贴图中实现的,称为为"pre-filter map"或者"radiance map",最终渲染时根据

# 3.3 预渲染贴图的生成
生成这张贴图时,首先假定

再最终渲染时,当
# 3.3.1 采样点的生成
根据前面章节的分析,微表面的法线分布可以用法线分布函数
由于微表面法线的概率密度函数
所以
用极坐标表示
对于各向同性系统,
D函数使用GGX函数,也就是
其中
计算
使用Mathmatica计算可得
根据前面的概率知识,可以得到微表面的法线的球坐标
然后即可计算出光线采样点的入射向量
# 3.3.2 代码
实际运算时,每个采样点的权重是不一样的,采用和宏法线的点积作为权重
// make the simplyfying assumption that V equals R equals the normal
vec3 R = N;
vec3 V = R;
const uint SAMPLE_COUNT = 1024u;
vec3 prefilteredColor = vec3_splat(0.0);
float totalWeight = 0.0;
for(uint i = 0u; i < SAMPLE_COUNT; ++i)
{
// generates a sample vector that's biased towards the preferred alignment direction (importance sampling).
vec2 Xi = Hammersley(i, SAMPLE_COUNT);
vec3 H = ImportanceSampleGGX(Xi, N, roughness);
vec3 L = normalize(2.0 * dot(V, H) * H - V);
float NdotL = max(dot(N, L), 0.0);
if(NdotL > 0.0)
{
prefilteredColor += texture2D(s_texSkybox, SampleSphericalMap(L)).rgb * NdotL;
totalWeight += NdotL;
}
}
prefilteredColor = prefilteredColor / totalWeight;
# 3.3 BRDF部分
观察公式的第二个拆分项
其中
设
带入上面的式中,可得
设
那么可得
# 3.4 BRDF查找贴图
上面的公式中,除了
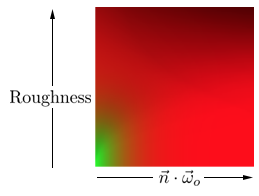
在运行时可以使用查表得方式从这张贴图上获取数据
# 3.4.1 BRDF贴图的生成
vec2 IntegrateBRDF(float NdotV, float roughness)
{
vec3 V;
V.x = sqrt(1.0 - NdotV*NdotV);
V.y = 0.0;
V.z = NdotV;
float A = 0.0;
float B = 0.0;
vec3 N = vec3(0.0, 0.0, 1.0);
const uint SAMPLE_COUNT = 1024u;
for(uint i = 0u; i < SAMPLE_COUNT; ++i)
{
// generates a sample vector that's biased towards the
// preferred alignment direction (importance sampling).
vec2 Xi = Hammersley(i, SAMPLE_COUNT);
vec3 H = ImportanceSampleGGX(Xi, N, roughness);
vec3 L = normalize(2.0 * dot(V, H) * H - V);
float NdotL = max(L.z, 0.0);
float NdotH = max(H.z, 0.0);
float VdotH = max(dot(V, H), 0.0);
if(NdotL > 0.0)
{
float G = GeometrySmith(N, V, L, roughness);
float G_Vis = (G * VdotH) / (NdotH * NdotV);
float Fc = pow(1.0 - VdotH, 5.0);
A += (1.0 - Fc) * G_Vis;
B += Fc * G_Vis;
}
}
A /= float(SAMPLE_COUNT);
B /= float(SAMPLE_COUNT);
return vec2(A, B);
}